Chestnut's Master Plan: Deploying Truly Dexterous Robots in the Real World
The path through robotics' two bottlenecks (hardware and data), and why a million working robots is closer than it looks.
Data and hardware problem
We don't yet have reliable robot hardware that runs at production-line uptime. We also don't have the billions of hours of robot demonstrations needed to train a general-purpose robotic foundation model. Both are open questions, and both are genuinely hard.
As of 2026, dozens of companies are racing to ship dexterous robots. Real progress is being made on the hardware side. But even if great hardware were sitting in front of us tomorrow, deployment would still be blocked on the second problem: where does the data come from?
Pre-training the foundation model on human video
In the past couple of years, the field has started to look seriously at human data. It's a brilliant idea.
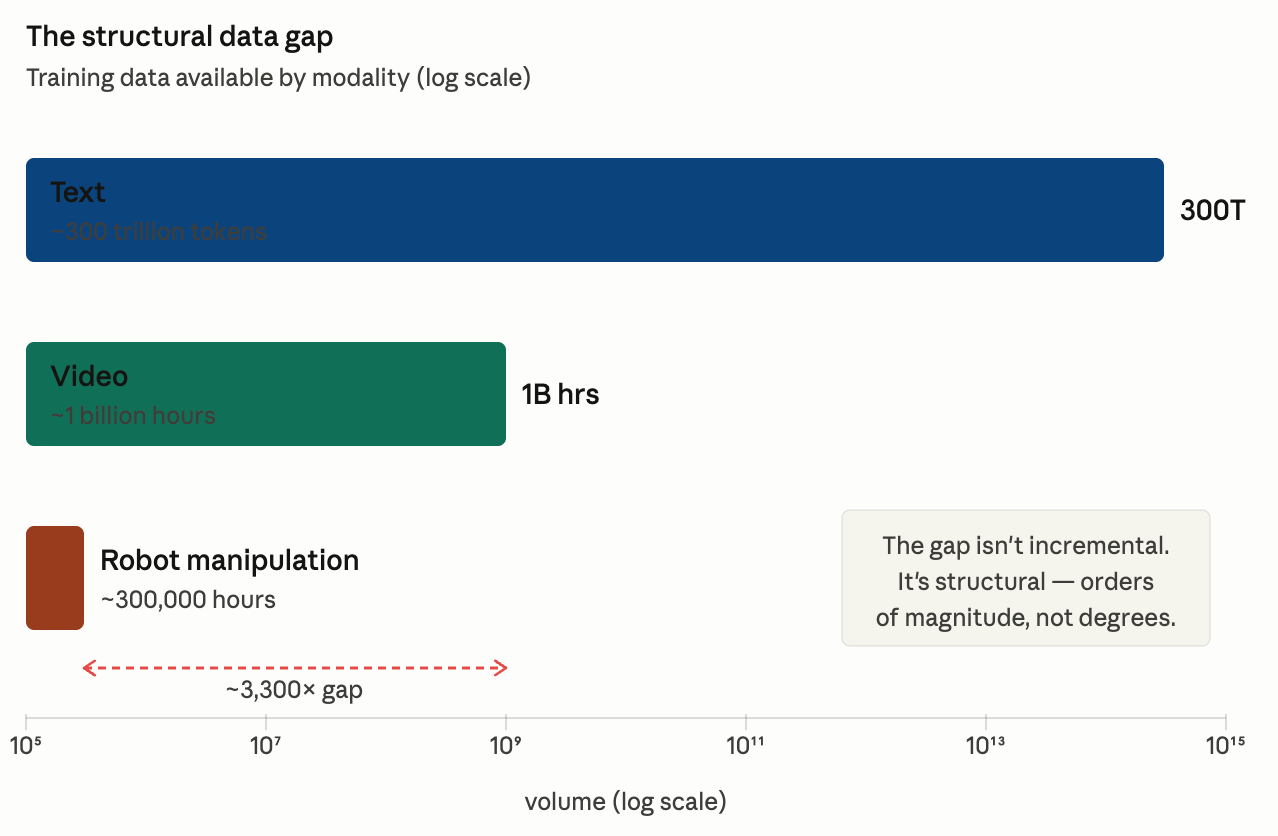
YouTube has billions of hours of third-person human video, freely available. Egocentric video is cheap to collect, with capture hardware now below $100. Soon we'll be flooded with human demonstration data, possibly on the order of the text corpus that fueled the LLM revolution.
Recent results confirm the bet. NVIDIA's EgoScale (arxiv 2602.16710) and Psi-0 (arxiv 2603.12263) both show a clean scaling law: more human pretraining data → better downstream task performance. Human data is the substrate for a robotic foundation model, just like internet text was for LLMs.
But pretraining alone gets us a generalized model: a multi-task learner, not a task master. The actions in human data are inferred, noisy, and carry embodiment, visual, sensory, and control gaps from any real robot. Pre-training can absorb that noise; deployment cannot.
Post-training and deployment is where the value lives
LLMs are pretrained into generalized learners and post-trained into task masters. Robotic foundation models will follow the same arc. The value lives in the post-training.
Deployment in a real factory demands a task-performance bar the pretrained model alone can't meet. The only path to that bar is task-optimized post-training, and the only fuel for task-optimized post-training is high-quality robot data. The insatiable demand we already see at Anthropic and OpenAI (both paying serious money for private high-quality datasets) is a preview of what's coming in robotics, except magnified, because robots interact with the physical world and small errors compound.
This is where Chestnut starts. Our mission is to deploy truly dexterous robots in real factories, robots that meet the reliability and task-performance bar that advanced manufacturing actually requires. To get there, we take a generalized pretrained robotic foundation model and steer it with task-optimized post-training, built on high-quality real-site robot data.
Why hardware decides everything
The other bottleneck is hardware. Robot data is instantiated by a specific robot body, and data from a different embodiment is far less valuable during post-training than data from the exact hardware you're deploying.
A small personal example: my Tesla Model Y with hardware 3.0, bought in 2023, still can't run FSD 13.0 or above; that only runs on hardware 4.0. The hardware delta between the two generations is small. The capability delta is huge. Hardware really matters for deployable performance.
For humanoid robots, the body can probably be controlled by a generalized cross-embodied controller. The hand cannot. To get the final sub-millimeter of manipulation precision, the hand has to be trained on data from hardware with zero embodiment gap. That makes the robot hand the single most important piece of hardware for deployment.
As of 2026, even after two years of impressive progress, a reliable, easy-to-use, high-DOF dexterous hand is still out of reach for most teams.
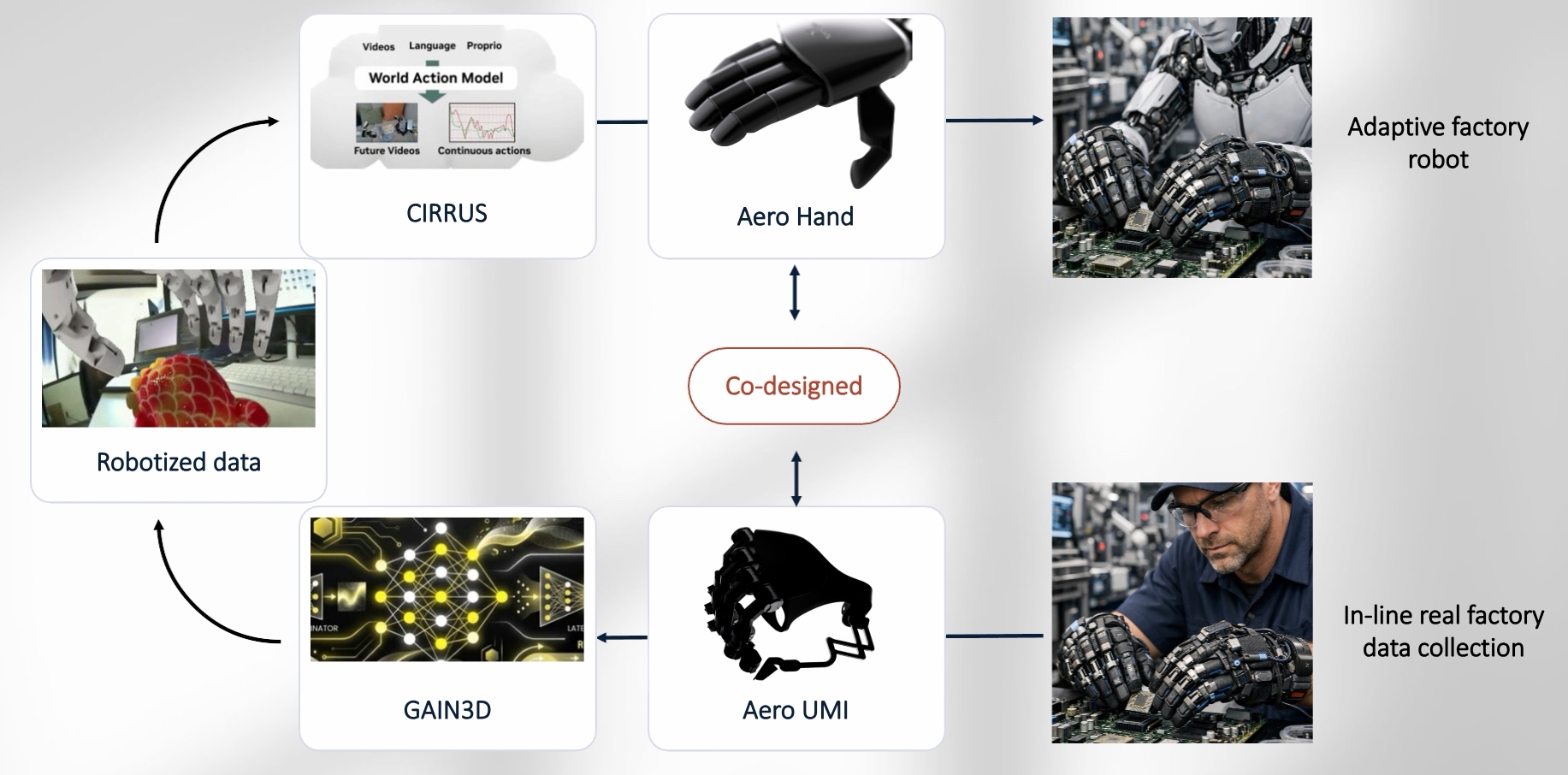
Our answer: Aero Hand + Aero UMI + GAIN3D
Our solution is a co-designed trio: a dexterous robot hand, the exoskeleton that captures data for it, and the algorithm that turns that data into a robot-ready training signal.
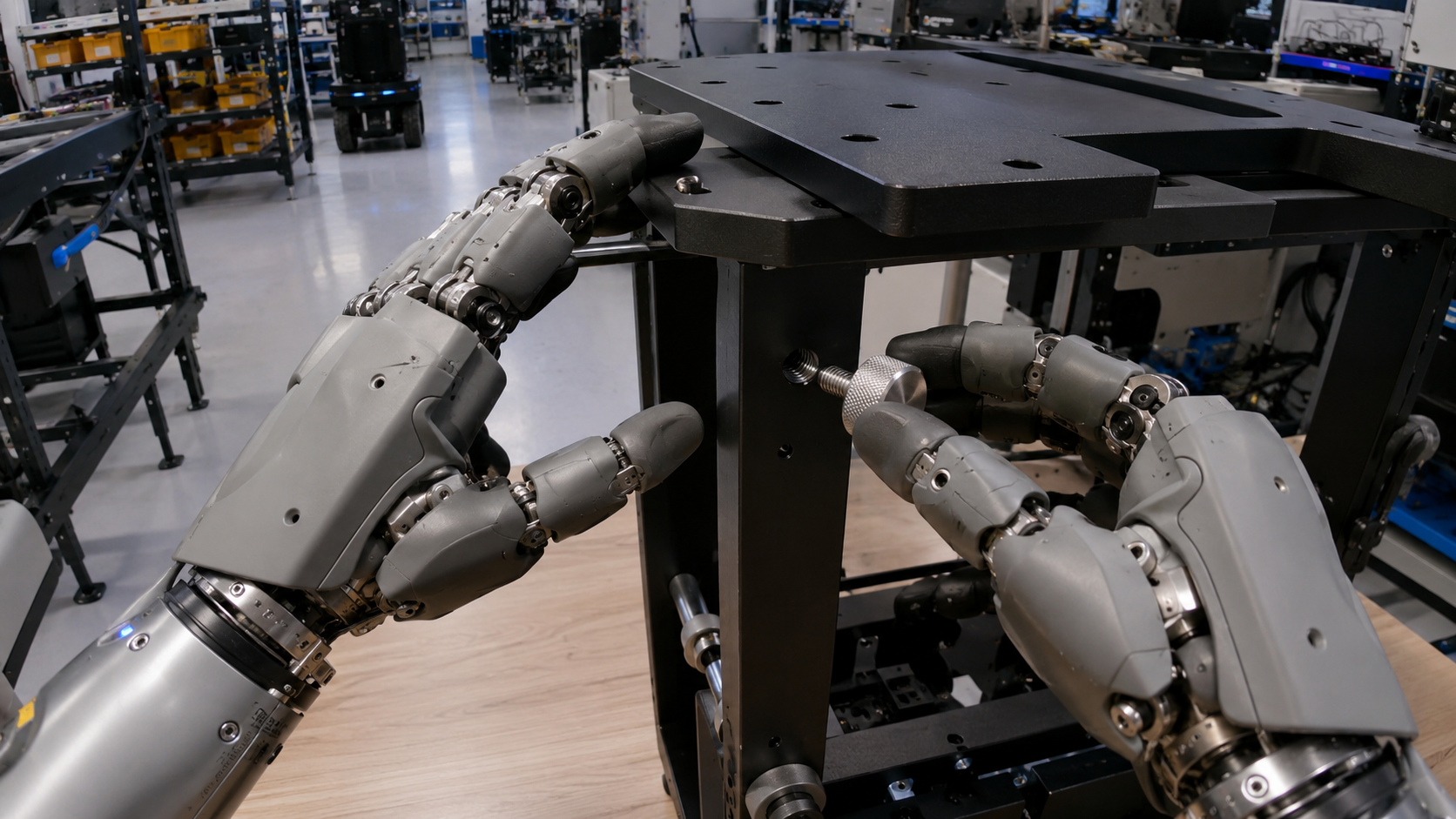
Aero Hand is a human-hand-sized, 18-DOF hand with sub-mm fingertip precision and 0.1 N tactile sensitivity. It carries a 20 kg payload and is built for a 3M+ cycle lifetime, for real factory duty, not demos.

Aero UMI is the human-worn exoskeleton. It is URDF-matched and tactile-matched to Aero Hand. Zero embodiment gap by design. It's also light and ergonomic enough to wear all day; I've worn one to pick up a thin blade from a table surface. That ergonomic bar matters. If a factory worker can't comfortably wear the device for a full shift, the data pipeline breaks before it starts.

GAIN3D is our 3D geometry-aware inpainting algorithm. It converts Aero UMI data into high-quality robot data with 99% usable pixels and no retargeting step. The robot doesn't need to be present during data collection at all.

The workflow is simple. Factory workers wear Aero UMI and do their real day-to-day tasks for a few days. We feed that data into our task-optimized post-training. Out the other end comes a robot (running Aero Hand in the same environment) that performs the same tasks. The initial deployment cycle compresses from months to weeks.
The model: built on SOTA, made production-grade
Sitting on top of the data engine is a SOTA foundation model. We build on the best models available and steer them with task-optimized post-training on our high-quality, zero-embodiment-gap data.
We take the deployment playbook LLMs and autonomous driving have already proven, and adapt every technique to the physics of dexterous manipulation. Real-time chunking enables low-latency action without sacrificing planning depth. Real-world reinforcement learning closes the long tail on precision and reliability: the last percent that separates a demo from a production robot. Principled guiderails make safety a structural property of the model, not a wrapper bolted on top. These techniques compound into a robot intelligence that survives the messiness of a real production line.
The vision
As foundation models keep getting more capable and robot hardware keeps getting more affordable, the constraints that have held robotics back (the absence of internet-scale embodied data, the absence of zero-embodiment-gap hardware) start to give way.
At Chestnut, we are building toward a world where millions of dexterous robots work in real factories, lifting real productivity and creating real material abundance for humankind.
The two bottlenecks aren't going to break by themselves. We intend to break them.